全國咨詢熱線:
全國咨詢熱線:
+86 158-1184-4241
全國咨詢熱線:
+86 158-1184-4241

Product center

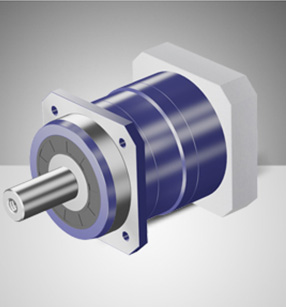
PLE系列精密行星減速機
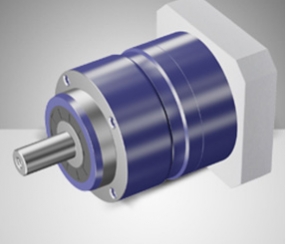
AH系列精密行星減速機

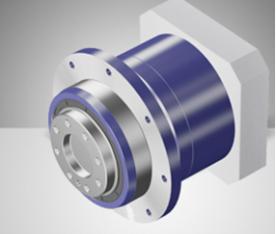
VLF078系列精密行星減速機
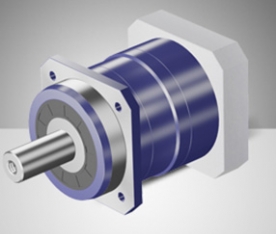
AF系列精密行星減速機

ZPLF系列精密行星減速機
PLFK系列行星減速機
ZAF系列精密行星減速機

ZPT系列行星減速機
Contact us

首頁
發布時間:2020-06-20 閱讀量:
出于成本的考慮,機械設計師們有時會選用步進電機代替伺服電機,在使用步進電機時,可能需要增大扭矩,減小步進電機的轉速。那么這時就需要給步進電機配上一個伺服行星減速機。可是有的工程師發現,在安裝好行星減速機后,定位時誤差很大,總也搞不清到底哪里出了問題,檢查一番后還是沒找到原因,這時工程師可能就困惑了,是伺服行星減速機精度不夠,定位不準嗎?還是說步進電機壞掉了呢?那么下面鵬輝科技小編就先談談伺服行星減速機結構原理再從步進電機的視角談談定位不準的問題,僅供大家參考。
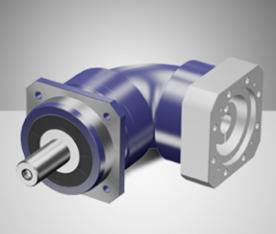
隨著工業自動化的迅猛發展,越來越多的企業運用到了伺服行星減速機。伺服行星減速機一般是指把電動機或其它高速運轉的動力通過行星齒輪的輸入軸上的齒數少的齒輪嚙合輸出軸上的大齒輪來達到減速的目的,伺服行星減速機是一種用于低轉速大扭矩的傳動設備。
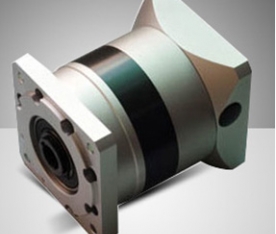
伺服行星減速機的結構是由一個內齒環緊密結合於齒箱殼體上,環齒中心有一個自外部動力所驅動之太陽齒輪,介於兩者之間有一組由三顆齒輪等分組合於托盤上之行星齒輪組,該組行星齒輪依靠著出力軸、內齒環及太陽齒支撐浮游於期間;當入力側動力驅動太陽齒時,可帶動行星齒輪自轉,并依循著內齒環之軌跡沿著中心公轉,行星之旋轉帶動連結於托盤之出力軸輸出動力。利用齒輪的速度轉換器,將電機(馬達)的回轉數減速到所要的回轉數,并得到較大轉矩的機構。在用于傳遞動力與運動的減速機機構中。